(来源:财通证券资管)
从春晚舞台到马拉松赛场,从各式各样的原型机到即将量产的工业助手,人形机器人正逐渐从科幻电影走进现实。
人形机器人,即模仿人类外观及行为的一种机器人。这是一个高度融合的产业,集成了人工智能、高端制造、新材料等诸多行业,有望成为继智能手机、新能源、汽车之后的又一超级赛道。
那么,人形机器人产业发展现状如何?应用场景有哪些?未来市场容量有多大?哪些环节值得重点关注?财通资管本期「最前研」将深度聚焦人形机器人,探索行业未来的机遇与挑战。

过去十几年里,人形机器人产业虽然持续在进步,但发展进程相对比较缓慢,而且玩家也主要集中于国外科技巨头公司。直到最近几年,随着AI技术的进步,包括一些工业技术的突破、供应链的完善以及国家政策的支持,机器人产业加速来到了量产临界点,商业化逐渐成为可能。
人形机器人技术奇点的到来,得益于硬件技术的复用、突破以及人工智能的发展。2016年全球电动汽车龙头切入人形机器人产业,将其过去在电动车制造领域的技术、经验迁移至机器人领域,例如自动驾驶技术复用、延续电动车驱动电机而来的关节执行器以及同源的能源系统优化,使得机器人产业在硬件方面有了质的飞跃。
尤其是最近几年,人工智能获得重大突破,在AI大模型的加持下,人形机器人的“智能”程度有了明显提升。人形机器人,说到底需要根据感知到的环境变化、收集到的各类信息等进行综合分析,经过“思考”后给出即时性的解决方案。从“思考”到“行动”,机器人运行的整个过程离不开算力的提升和算法的成熟。

过去在社交媒体上,很少能看到有关国产机器人的话题,如今却大不相同。实际上,国内厂商也在加速布局人形机器人赛道,并通过差异化技术路径实现追赶,形成“算法突破+场景深耕+供应链降本”的竞争格局。
比如,某国内代表企业通过模型架构的创新,整合多模态大模型、混合专家系统与百万级真机数据,实现了小样本快速泛化与跨本体迁移能力,推动具身智能从实验室向家庭服务、工业协作等场景渗透。
再比如,有的国内企业聚焦轻量化关节执行器与低成本运动控制算法,通过自研电机与减速器,实现了人形机器人硬件成本的大幅降低;同时,还有的国内企业提出群脑网络架构,通过“超级大脑”(多模态推理大模型)与“智能小脑”(跨场域感知技术)的协同,实现复杂产线级任务的高效拆解与调度,推动国内人形机器人从单机自主向群体智能进化。
更为重要的是,人形机器人产业也逐渐获得国家政策的支持,产业实现跨越式发展可期。
从国家层面来看,工信部2023年发布《人形机器人创新发展指导意见》,提出了机器人发展的路线图: 到2025年初步建立创新体系,突破“大脑、小脑、肢体”等关键技术,培育2-3家全球生态型企业;到2027年实现核心技术全面突破,形成国际竞争力的产业生态,推动人形机器人成为经济增长新引擎。2025年政府工作报告首次将“具身智能”列为未来产业,与6G、量子科技并列,政策扶持力度显著提升,标志着国家战略向人工智能与机器人深度融合的方向聚焦。
从地方政府来看,深圳、浙江、上海、北京等地纷纷推出各地政策,在资金和场景开放等方面加大对人形机器人产业的支持。
尽管成本控制、技术可靠性、社会接受度等挑战依然存在,但随着AI泛化能力提升与供应链成熟,人形机器人或将从科幻符号蜕变为社会生产力的核心要素,重新定义“人类”与“工具”的边界。

在工业领域,工业机器人已经足够普及,但问题在于,工业机器人的很多局限导致原本的工作效率成为了产能的瓶颈,需要有更新的模式去迭代,推动效率的提升。
例如:在汽车制造车间,机械臂以0.02毫米的精度完成焊接,但每次车型切换都要停产三天;在电子工厂,机器人以0.1秒/次的速度贴装芯片,却需要人工补检缺陷。这些看似高效的工业机器人,正面临智能化时代的结构性挑战。
相比人形机器人,工业机器人存在着三大痛点:1)柔性生产瓶颈;2)动态处理短板;3)人机协作障碍。简单来讲,工业机器人应对复杂环境的能力较弱,一些精细化操作难以实现,同时无法与工人共享工作空间,人机协作的难度比较大。
更为重要的是,对于制造领域来讲,效率和成本始终是绕不开的问题。由于工业机器人的固定编程模式,导致应用场景切换时的成本较高,比如全球知名电动汽车品牌,曾因生产车型的切换,产能损失超10万辆;再比如,在航空航天精密装配中,仪表盘线束插接等复杂操作仍需人类工程师介入。
而依靠多模态感知、实时决策系统和安全共融设计等技术的创新,理论上人形机器人能够实现对工业机器人的超越,较好地解决上面这些痛点问题。多模态感知融合了视觉、力觉、听觉传感器,能够大幅提高对环境信息识别的精度和自主处理软性物体的能力,实时决策系统搭载边缘计算单元,可以缩短机器人响应延迟时间,支持突发任务规划;同时采用碰撞检测+力控反馈技术,能够实现人机协作。
随着各种技能加身,人形机器人的使用场景也会不断扩大,预计未来将从工业场景逐渐向家庭服务等多元场景渗透,比如老年护理方面,国外已经在尝试使用机器人通过毫米波雷达监测老人跌倒并搀扶;在物流领域,人形机器人已经可以处理冷链泡沫箱等异形包装物;在农业领域,柔性抓取技术可以实现机器人采摘苹果这类精细劳动,并可大幅提升苹果采摘的效率。
除了常见的汽车工厂、仓储物流等工业场景下,家庭服务、医疗辅助、酒店接待、救灾救援、危险勘探等各类场景,也有望见到人形机器人的身影。

人形机器人对社会的改造或将是全方位的,不仅仅局限于某个单一的领域或行业,因此其远期的发展空间非常大,随着技术的不断迭代,应用场景的不断成熟,人形机器人的理解力、行动力或逐渐接近人类,在工业、生活场景中扮演更加重要的角色。

人形机器人,不仅外形设计上与人类相似,运行逻辑也可以类比人类,遵循“感知→思考→行动”的基本链条。实现这个过程的一些软件、硬件,即对应着机器人的投资机会所在。
人类借助眼(视觉)、耳(听觉)、鼻(嗅觉)、口(味觉)、皮肤(触觉)等身体器官感知环境,接收外界的信息,同时与大脑配合,对肢体传达指令,从而更好地适应环境、规避风险。
与人类一样,人形机器人运行的底层思维也是如此,包括感知层(感官系统)、决策层(大脑)和执行层(肢体)三个层面。
比如,当机器人在工厂搬运箱子时,感知层发现箱子位置,决策层计算最佳抓取路径,执行层控制手臂和手指完成搬运。整个过程类似人类“看到目标-思考如何拿-动手执行”的连贯动作。
机器人的感官系统主要包括摄像头以及各种传感器,这些相当于机器人的眼睛、耳朵、嘴巴等。比如,机器人可以通过摄像头观察环境(如识别障碍物)、借助力传感器感知接触力度(如握杯子时调整力道)、惯性测量单元(IMU)监测自身姿态(如保持平衡)等。
接收到感知数据后,通过大模型(类似人类大脑)快速分析并制定行动方案。这和人类思考决策的过程是相似的。同样还是上面的例子,当机器人看到桌上有水杯时,模型会结合视觉、触觉数据,判断“如何抓握杯子才不会滑落”。
最后,机器人将思考分析的决策转化为实际的指令,并按照指令去完成相应的动作。例如,电机驱动关节弯曲、减速器调节运动速度、灵巧手完成抓取“水杯”的动作。这一层相当于人类的肌肉和骨骼系统。
理解机器人运作逻辑,和把大象装进冰箱里的步骤一样简单。但理论终归是理论,实施的难度并不小。对于人形机器人而言,这不仅涉及很多关键零部件的技术突破,还有赖于软件与AI架构的迭代,以及新材料的运用和伦理、隐私、安全等问题的解决。即使是机器人灵巧手的制造,就不是一件容易的事。
双手是人类最灵活的部位。通过27块骨头、50多块肌肉和100多个关节之间的协同,人类的双手能够实现从搬举重物到捏取绣花针等一系列动作,而人形机器人想要模拟人类的抓取动作,灵活掌握这些技能,针对不同的物体运用合适的抓取角度和力度等,就需要借助各种传感器。而这对传感器的工艺、材质尤其是精度方面提出了较高的要求。体积太大不行,体积合适精度不够也不行。
从软件结构上来看,大模型的使用彻底改变了人形机器人和以往工业机器人时期的运用,大模型带来了认知能力的跨越式提升,使机器人具备场景理解能力,并可实现多指令同时实行等操作。同时,大模型泛化之后,机器人适应新任务的速度也会明显提升,机械臂抓取陌生物体的学习时间从小时级缩短到分钟级。
不过,当前机器人硬件的难点在于,执行器的使用寿命较短,频繁运动容易导致部件磨损,从而影响精度;同时,在潮湿等环境下,触感器可能会失灵,传感器的可靠性也有待提升。
而软件方面主要瓶颈在于,场景泛化不足和自主学习成本较高。比如,机器人经过训练后,能够熟练完成“拧螺丝”的动作,但遇到不同形状的螺丝,可能仍“不知所措”;而要训练它,使其更“聪明”,则需要耗费大量的算力。
而在硬件、软件之外,伦理与安全等问题,也是人形机器人产业发展未来必须面对的现实。比如,家庭机器人可能无意中会记录下用户的生活习惯等隐私数据,再比如当人机协作时,如何避免在突发情况下机器人能够及时停止危险动作,从而确保人类的安全。
毋庸置疑,人形机器人的产业空间巨大,但仍有很长的路要走。对于这样一个尚处于发展初期的行业来说,投资机会无疑也是巨大的。其中,人形机器人的核心部件如同人体的关键器官,在产业发展过程中有望率先获益。
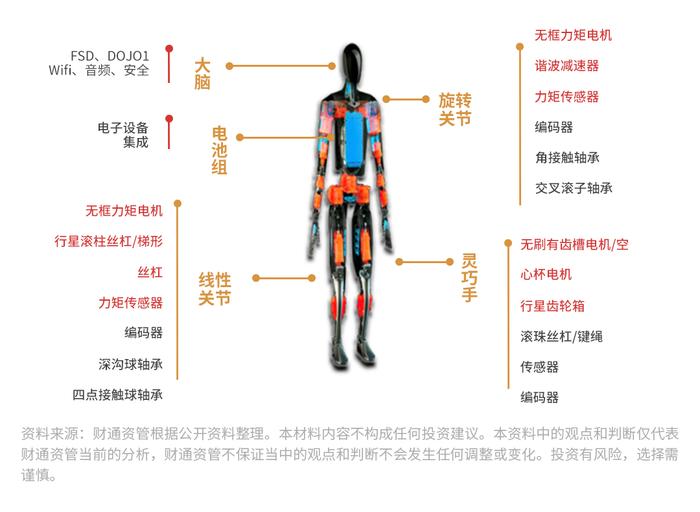
首先是“灵巧手”。这是人形机器人抓取物体的关键部件,其技术路线和配置方案直接影响机器人的操作表现,承担着类似人类手部的功能,使机器人能够完成各种精细的操作任务。
从结构来看,灵巧手的结构设计核心三要素是驱动、传动、传感,价值量较高的零部件为空心杯电机、丝杠、减速器、触觉传感器等。空心杯电机是驱动环节的主要电机,是灵巧手的最确定方案,具有能量转换效率高,起动、制动迅速,运行稳定可靠且重量轻、体积小等优势。
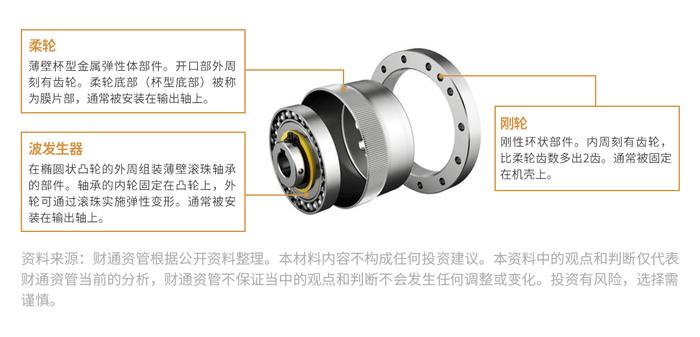
其次是减速器。常用的工业精密减速器有行星减速器、摆线针轮减速器、谐波减速器、RV减速器等,人形机器人通常采用谐波减速器与行星减速器。
这两种减速器可谓是各有优劣,其中谐波减速器传动比大、重量体积小,搭配力矩传感器可以实现精确的力控,是性能更出色的方案,但成本较高;行星减速器传动比较小,相同力矩要求下重量与体积均大于谐波减速器,这将限制其在人形机器人大部分关节的使用,但其传动刚度较高,可适用于电机自带的电流环力控,降低了传动与力控环节的成本。
第三,行星滚柱丝杠。丝杠是将旋转运动变成直线运动的传动副零件,由螺杆进化而来,可分为滑动丝杠、滚动丝杠及静压丝杠,其中滚动丝杠应用最为广泛。丝杠是线性执行器的核心,加工难度较大尚未实现国产替代。

最后,传感器。由于机器人有着多种多样的感应需求,因此又会被分为力传感器,触觉传感器等等多种不同的传感器类型。力传感器是机械、电子、算法、计量融合的复杂交叉学科,技术壁垒较高。目前,全球的力传感器厂商主要包括日韩、欧美、中国地区的供应商。国产六维力/力矩传感器与海外厂商传感器在灵敏度、串扰、抗过载能力及维间耦合误差等方面仍存在一定差距。

当灵巧手能准确感知握力避免捏碎鸡蛋,当机器人通过视频学习新技能如同手机更新系统……这不仅是技术的胜利,更是人类创造力的延伸。
当前,人形机器人正经历技术突破、政策支持与资本涌入的“共振期”,国外龙头公司引领行业量产进程,国内政策与产业链协同加速追赶。处于产业初期的人形机器人,投资机会或许是全方面的,无论是硬件、软件,未来都有望成为投资的富矿。从远期来看,硬件降本与软件泛化能力是核心变量,而灵巧手、减速器等关键部件厂商或将率先受益于产业的发展。
也许未来,人形机器人的应用如同如今的智能手机一样司空见惯。这场由钢铁与代码驱动的进化,终将把人类从重复繁琐的劳动中解放出来,用机器制造机器的场景终将成为现实。